 Vida Imre
Vida Imre


2017-2018
Önvezető felderítőrobot
A projekt célja egy olyan önvezető felderítőrobot létrehozása volt, ami távolról vezérelhető, vagy az önvezető mód aktiválása esetén bármilyen külső beavatkozás nélkül képes bejárni a rendelkezésére álló teret, és közben adatokat gyűjteni arról.
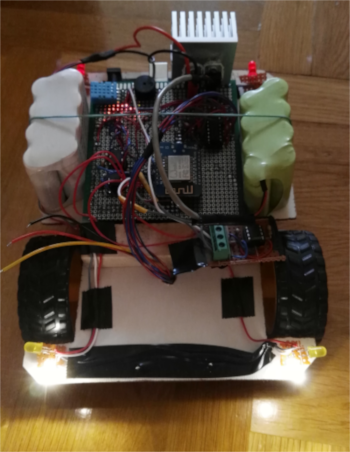
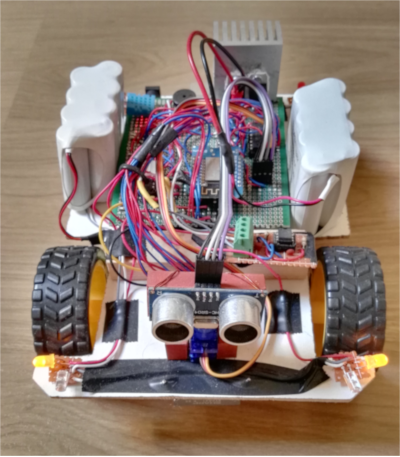
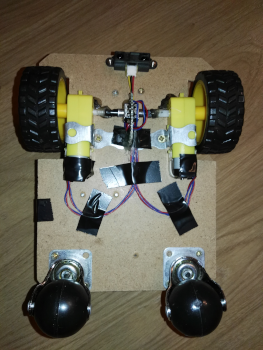
Néhány kép a prototípusról:

A projekt részletes bemutatása:
A prototípus irányítását két mikrokontroller látja el. Egy Arduino Mega látja el a vezérlési feladatokat, ő felel az akadályok kikerüléséért, a mozgás vezérléséért és a szenzorokból érkező adatok fogadásáért, elemzéséért. A vezeték nélküli valósidejű adattovábbításért egy ESP8266 modul felel, ami WiFi hálózathoz csatlakozva továbbít adatokat egy szerver felé, ahonnan a felhasználók bármikor lekérdezhetik azokat. A beérkező adatok tartalmazzák többek között a robot GPS koordinátáit a rászerelt GPS vevőnek köszönhetően, a környezeti hőmérsékletet és relatív páratartalmat, az aktuális távolságot a legközelebbi objektumtól (a mozgatható ultrahangos távolságmérő segítségével) illetve a levegő minőségét meghatározó adatokat (a prototípuson ezt a feladatot egy MQ-135 szenzor látja el). Ezeknek az adatoknak az ismeretében létrehozható egy 2 dimenziós térkép a bejárható területekről. A robot az aljára szerelt infravörös távolságmérő segítségével képes érzékelni az alatta lévő tárgyak szélét, és így elkerülni a leesést például egy asztalról. A robot által mért adatokból a térkép többféleképpen is legenerálható. Figyelembe vehetjük az ultrahangos távolságmérő szenzor és a GPS modul által szolgáltatott értékeket (a GPS koordináták pontosíthatók a kerekeknél lévő elfordulásmérő szenzorok használatával), így megkaphatjuk a robot számára elérhető területeket. Ezen kívül ha figyelembe vesszük a külső hőmérsékletet és a különböző gázok koncentrációját, megkaphatjuk az emberek számára biztonságosan bejárható területeket például egy katasztrófa helyszínén.